
知識
- 赤道儀の仕組み
- ステッピングモーターの原理
- Arduino IDE
工具
- ボール盤
- 2.5mm, 5.5mm ドリル
- 3mm, 1/4inch タップ
- はんだごて
開発環境
- PC
- Arduino IDE
運用環境
- Android機
- カメラ
- カメラ三脚
- カメラ雲台
- 12v電源
- 本体 17HS2408S-PG, Ratio 720:1
- 制御
チタン M3×6mm
- 本体
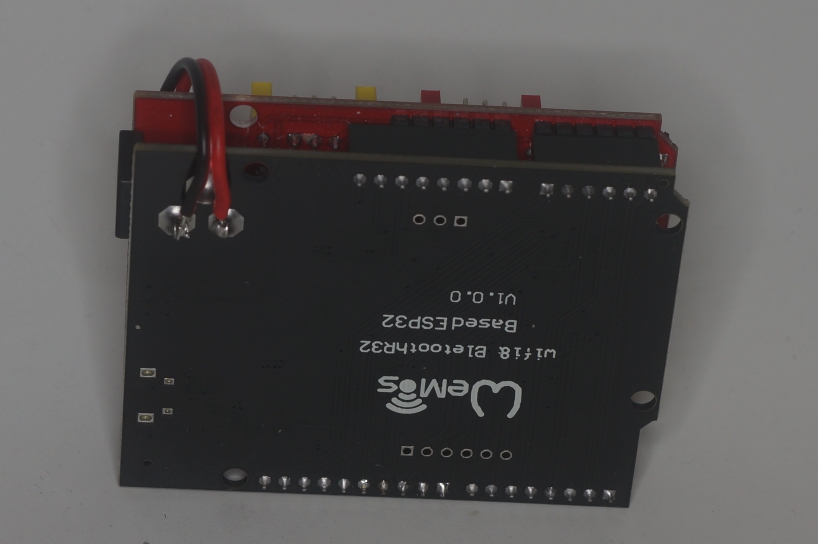
- 配線 ESP32ボードド(Wemos D1 R32)の12v端子のに半田づけして、CNC3シールドに接続します。
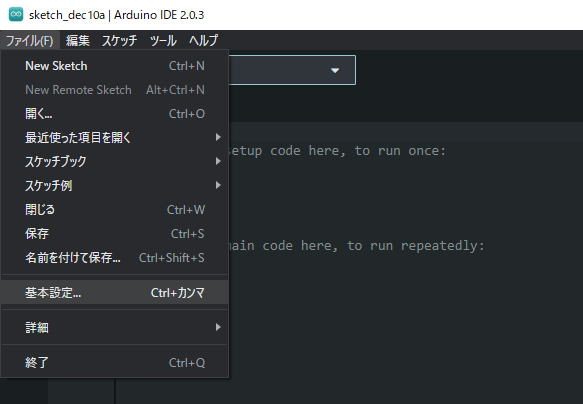
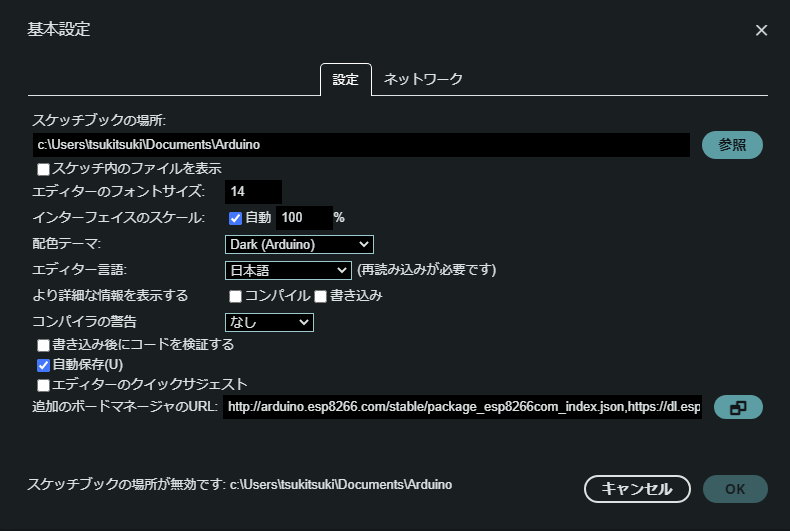
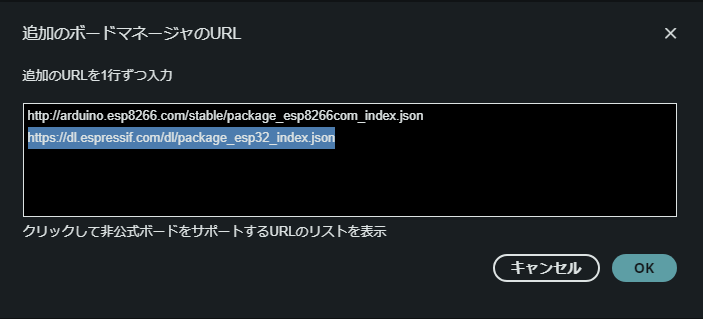
- ArduinoIDE設定 メニュー > ファイル > 基本設定 > 追加ボードマーネジャURL
- プログラム入手 制御ソフトに OnStep を使用します。
- プログラム設定 モータの1ステップの角度:1.8、マイクロステップ:16、ギアの減速比:720
- 端末 Android タブレットに Onstep Controller2 をインストールします。

アルカスイス互換のアリミゾにフランジの現物で位置を合わせ3.5mmの穴を4つ空けます。
4mmのタップでネジを切ります。
ステッピングモータ用ブラケットにアルカスイス互換アリガタ現物で位置を合わせ5.5mmの穴を3つ空けます。
1/4インチのタップでカメラネジを切ります。

4mmのネジでフランジをアリミゾに取り付けます。
アルカスイス互換のアリガタをモータ用ブラケットに取り付けます。

モータ用ブラケットは3mmのネジでギアボックスに取り付けます。
アリガタをアリミゾに取り付けます。

2つのモータが直交するようにアルカスイス互換のアリガタとアリミゾを取り付けます。

三脚と雲台に載せて完成です。
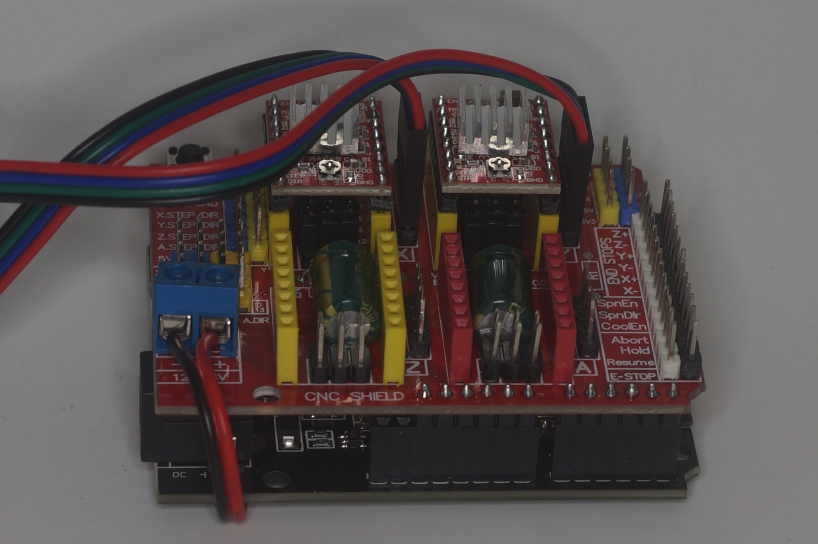
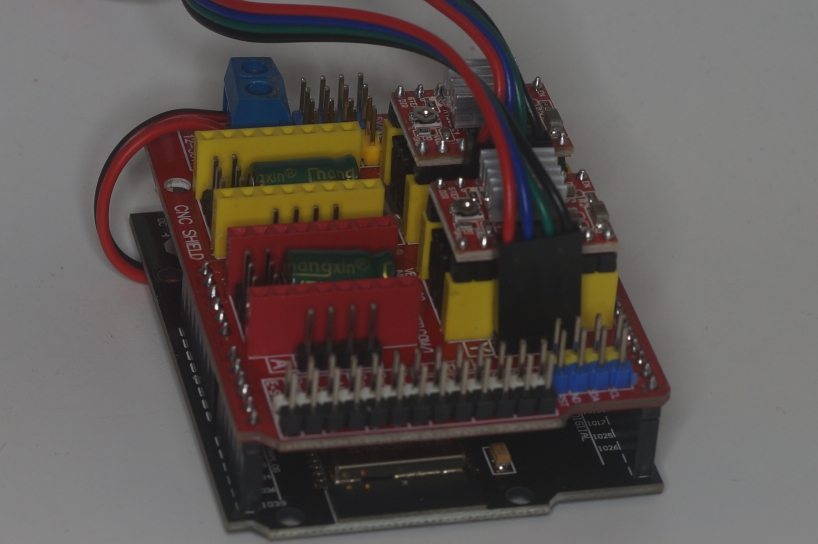
XとYのドライバのジャンパは1/16マイクロステップにするためそれぞれ3つ付けます。
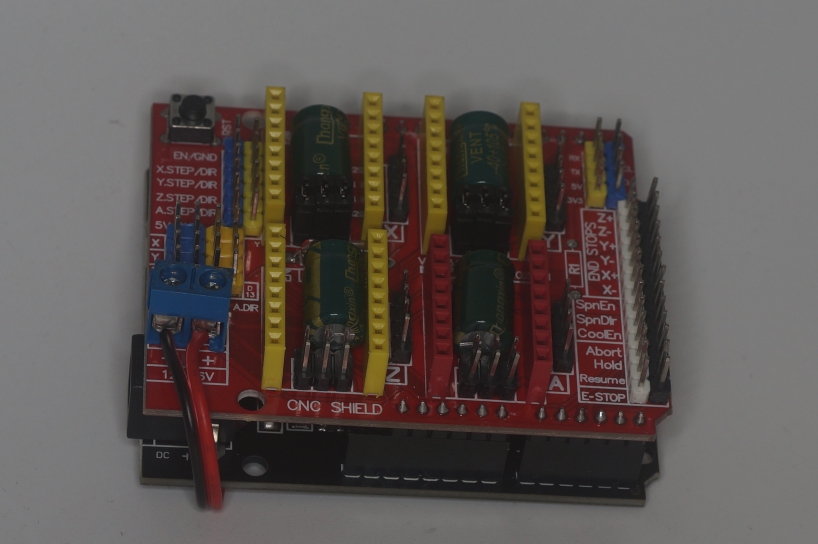
YとAの間にある10KΩ抵抗を取り除きます。
XとYそれぞれにA4988ドライバ基板を載せます。
モータを接続します。
に追記します。
https://dl.espressif.com/dl/package_esp32_index.json
https://github.com/hjd1964/OnStepからダウンロードします。
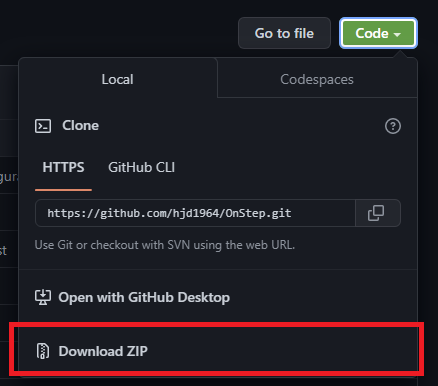
製作するコントローラーごとにフォルダを作成して展開しておきます。
ここでは、TsukiTsuki001 というフォルダを作成して、展開します。
OnStepというフォルダができて展開されていればOKです。
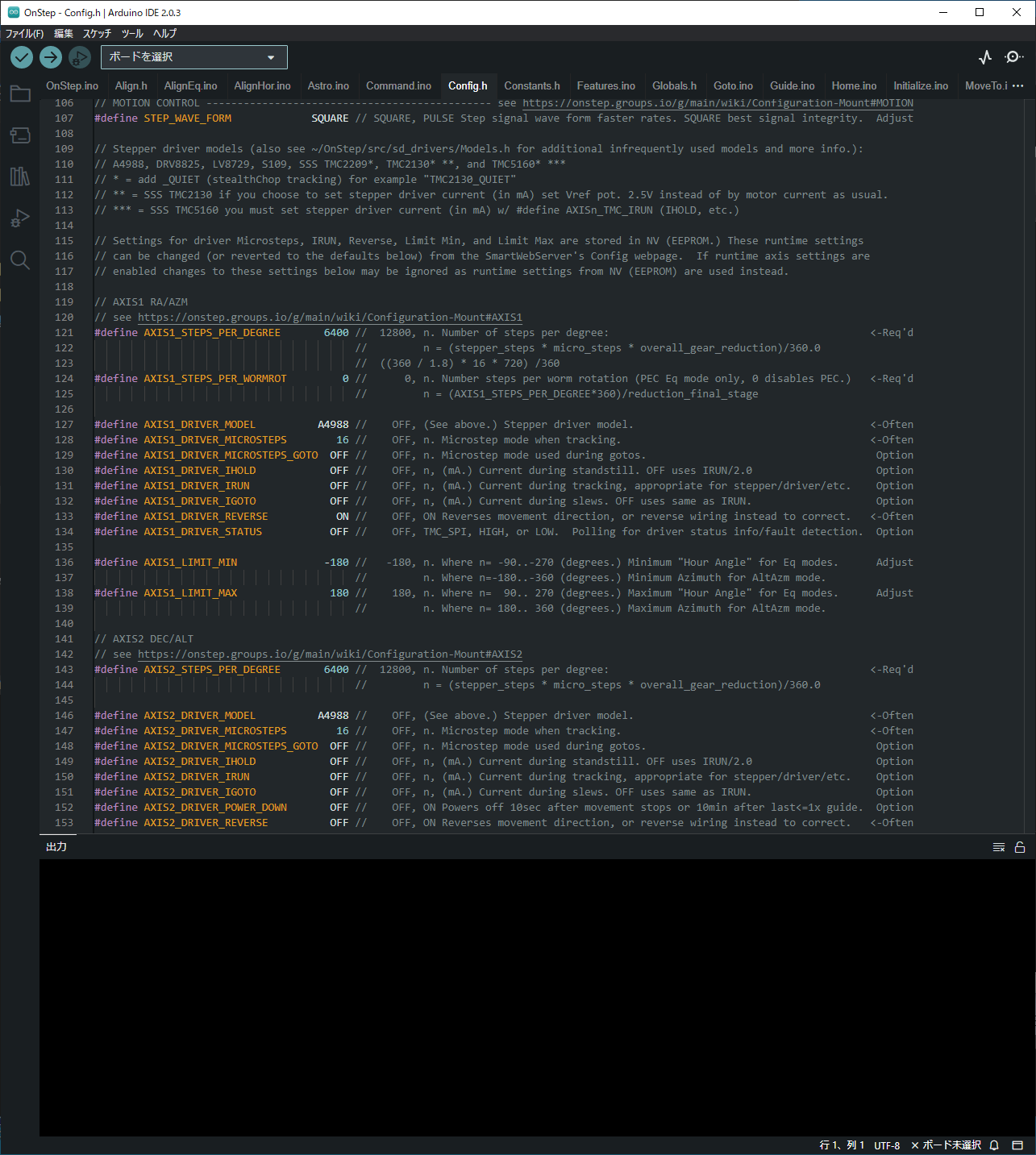
から、出力軸1度回転のステップ数 AXIS1_STEPS_PER_DEGREE は
360 / 1.8 * 16 * 720 / 360 = 6400
となります。
config.h を下記の部分を書き換えます。
:
#define PINMAP CNC3 // OFF, Choose from: MksGenL2, MiniPCB2, MaxPCB2, MaxESP3, CNC3, STM32Blue, <-Req'd
:
#define SERIAL_C_BAUD_DEFAULT ON // OFF, n, ON for ESP32 Bluetooth. Option
#define SERIAL_C_BLUETOOTH_NAME "TsukiTsuki #001" // "On..", Bluetooth device name for ESP32. Option
:
#define LED_STATUS OFF // ON, Blinks w/sidereal tracking otherwise steady on indicates activity. Option
:
#define SLEW_RATE_BASE_DESIRED 5.0 // 1.0, n. Desired slew rate in deg/sec. Adjustable at run-time from <-Req'd
:
#define MFLIP_SKIP_HOME ON // OFF, ON Goto directly to the destination without visiting home position. Option
:
#define AXIS1_STEPS_PER_DEGREE 6400 // 12800, n. Number of steps per degree: <-Req'd
:
#define AXIS1_DRIVER_MODEL A4988 // OFF, (See above.) Stepper driver model. <-Often
#define AXIS1_DRIVER_MICROSTEPS 16 // OFF, n. Microstep mode when tracking. <-Often
:
#define AXIS1_DRIVER_REVERSE ON // OFF, ON Reverses movement direction, or reverse wiring instead to correct. <-Often
:
#define AXIS2_STEPS_PER_DEGREE 6400 // 12800, n. Number of steps per degree: <-Req'd
:
#define AXIS2_DRIVER_MODEL A4988 // OFF, (See above.) Stepper driver model. <-Often
#define AXIS2_DRIVER_MICROSTEPS 16 // OFF, n. Microstep mode when tracking. <-Often
:
ビルドして、ESP32ボード(Wemos D1 R32)に書き込みます。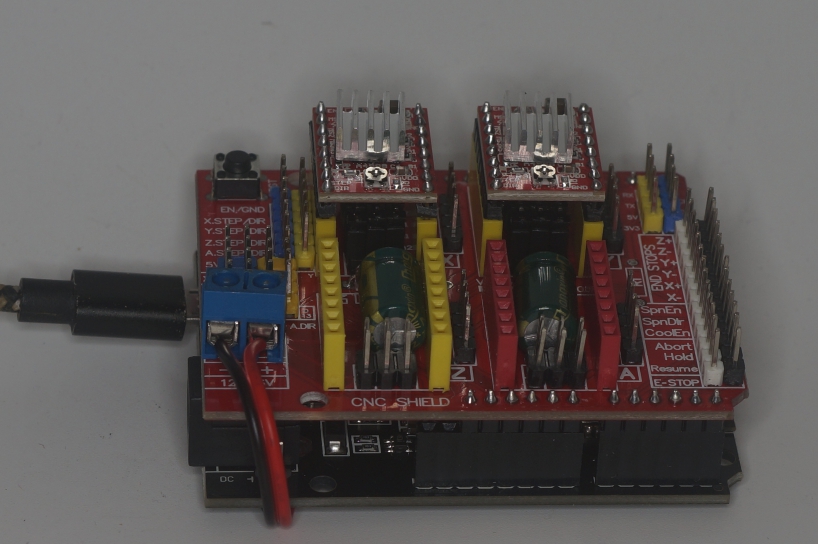
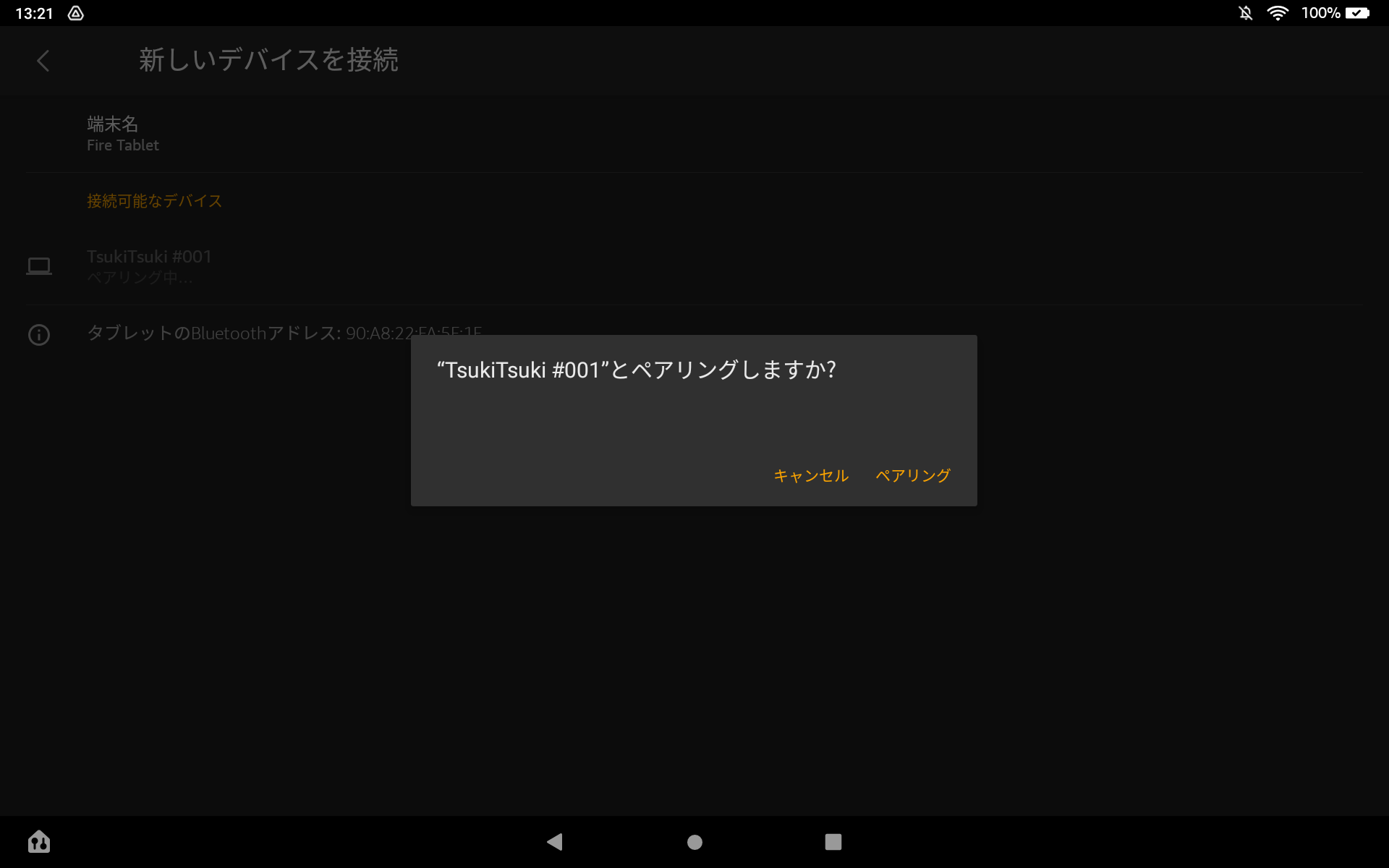
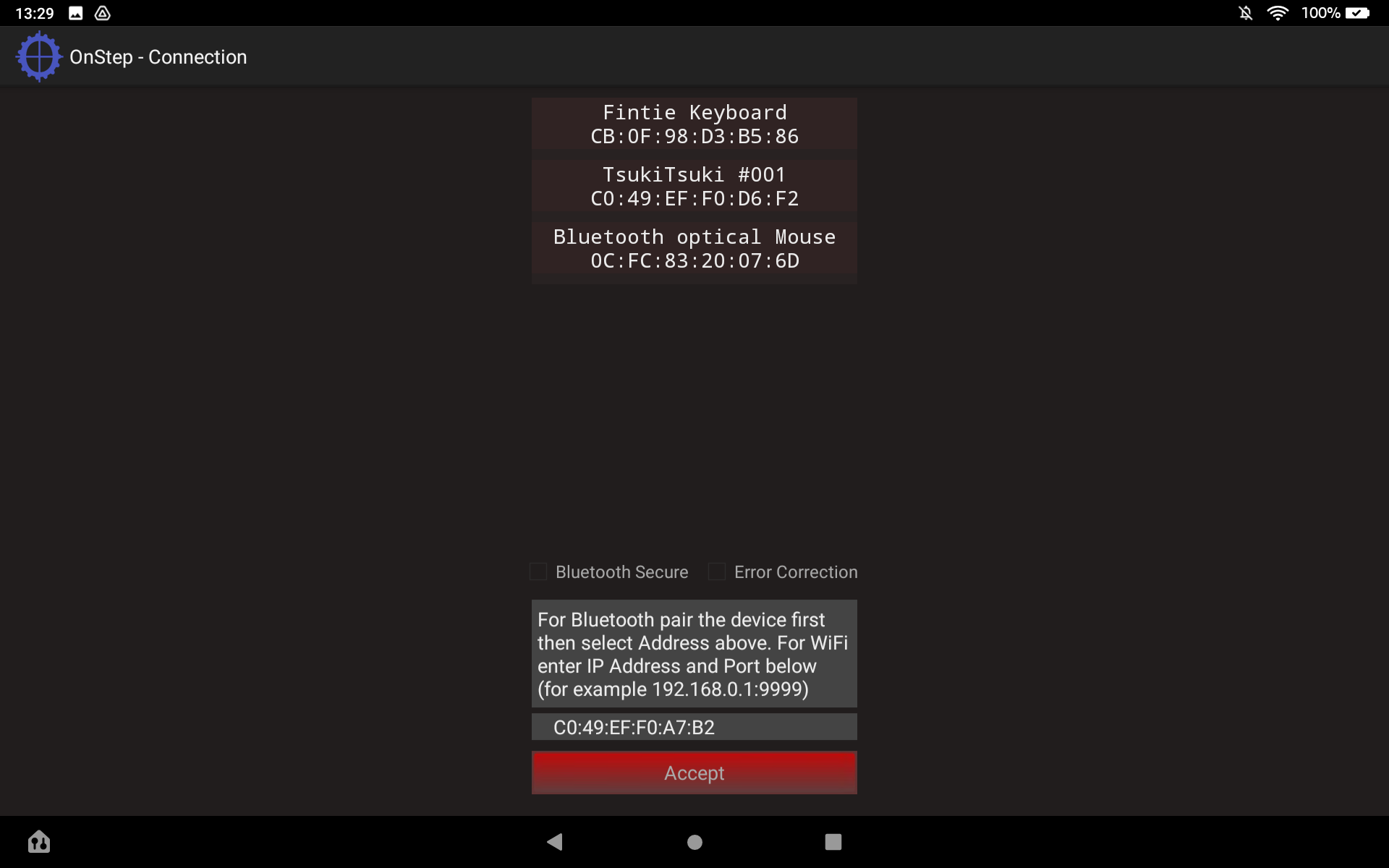
Bluetooth でペアリングします。






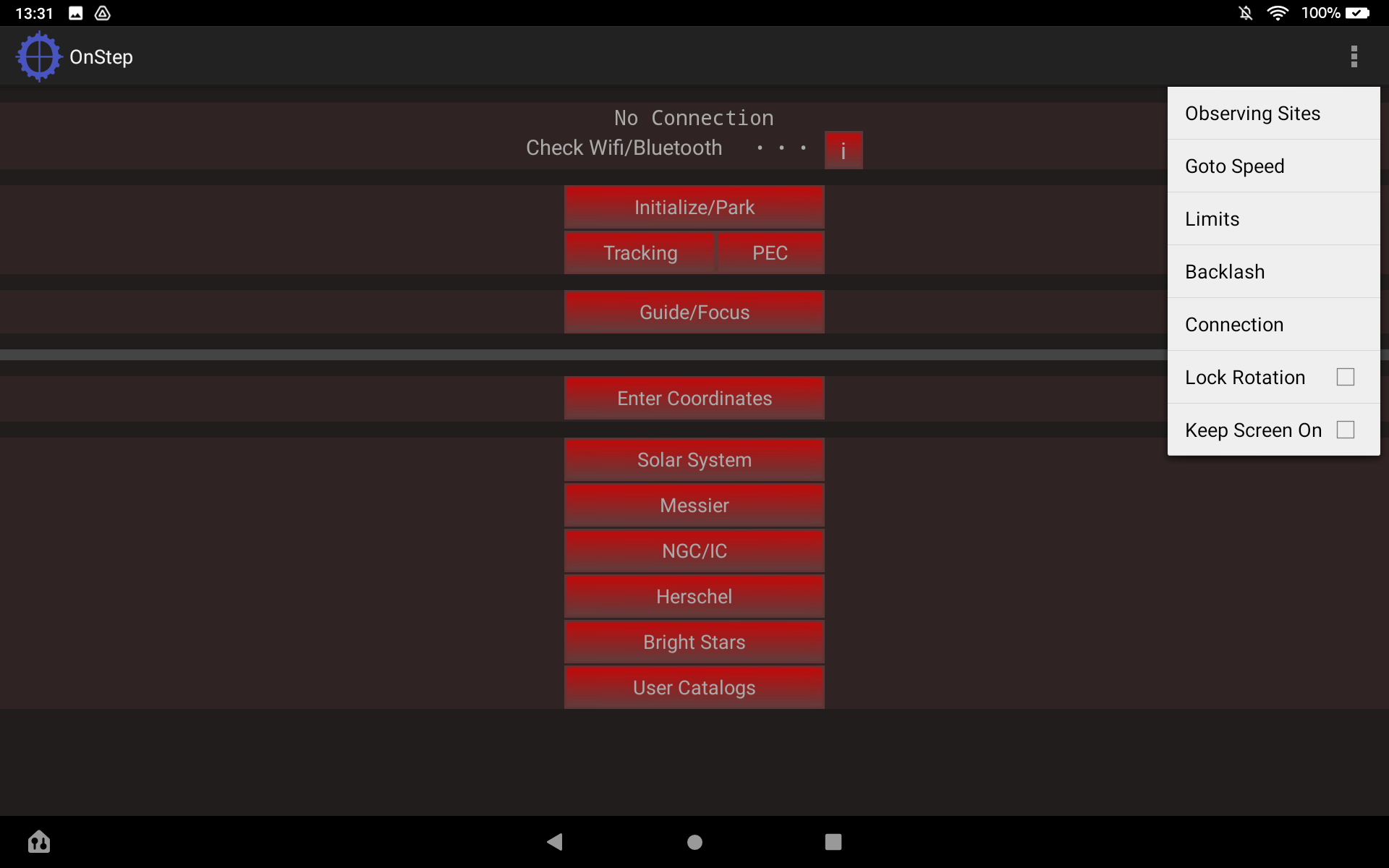
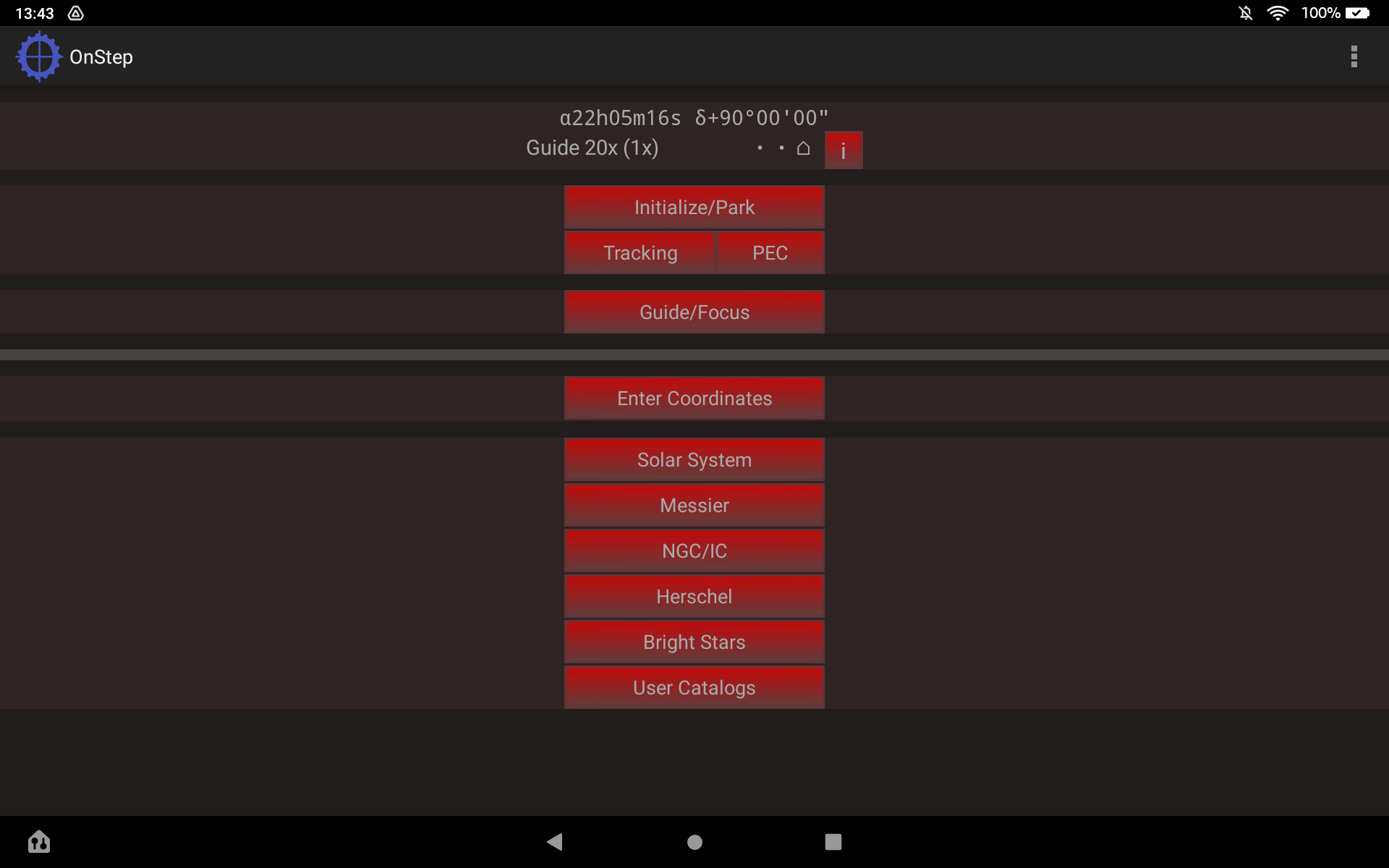
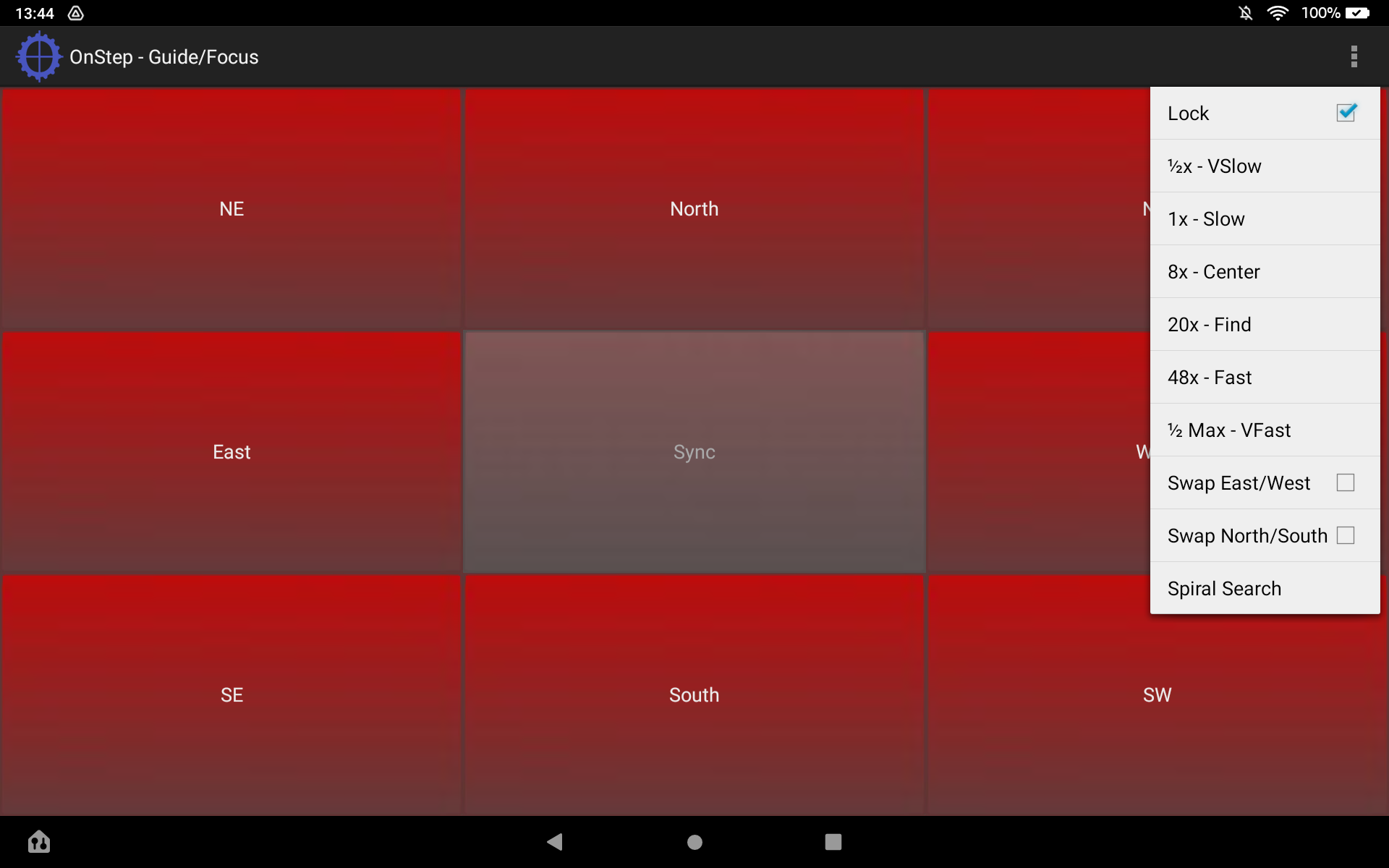
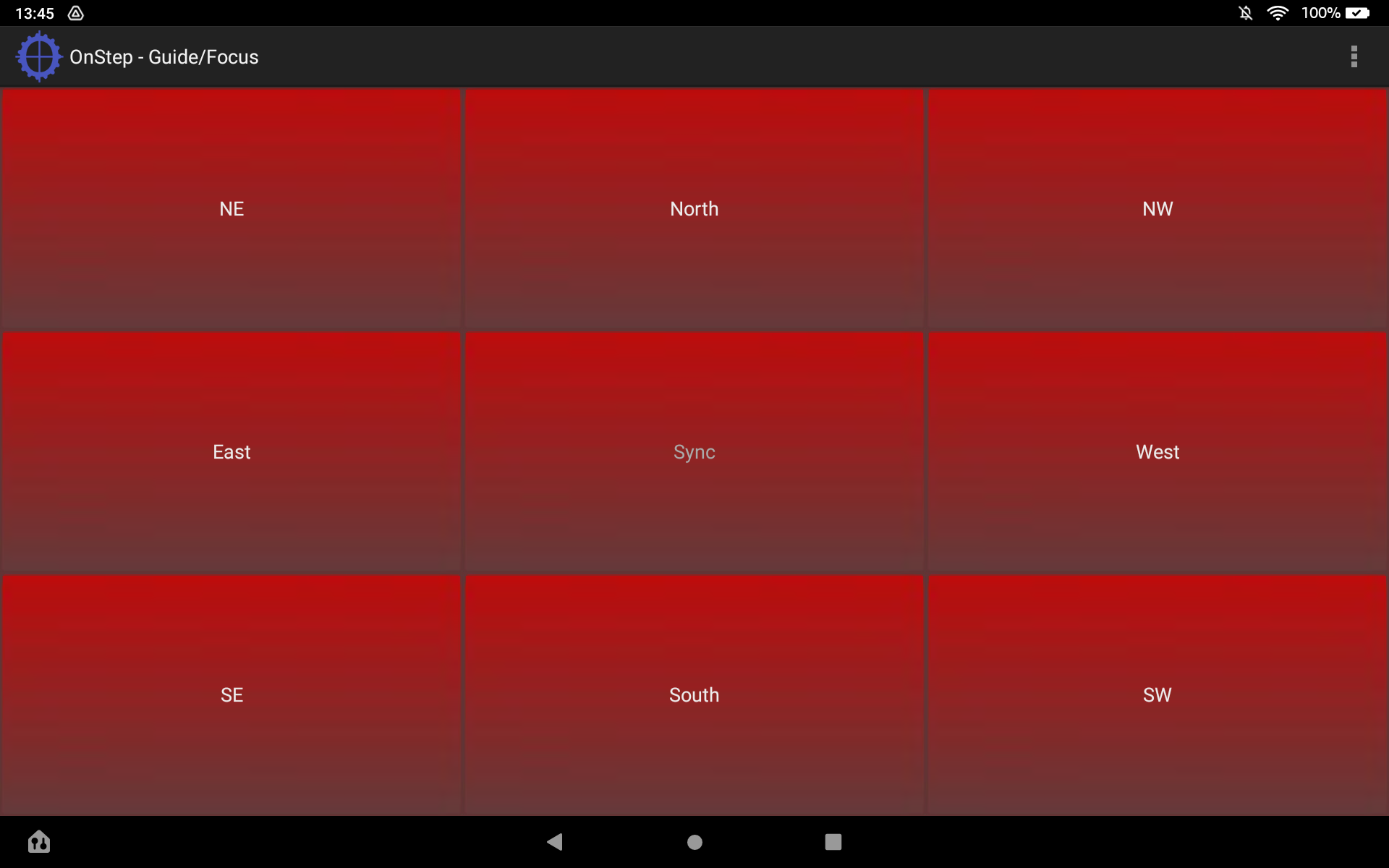
OnStepを起動して確認します。まずは接続です。
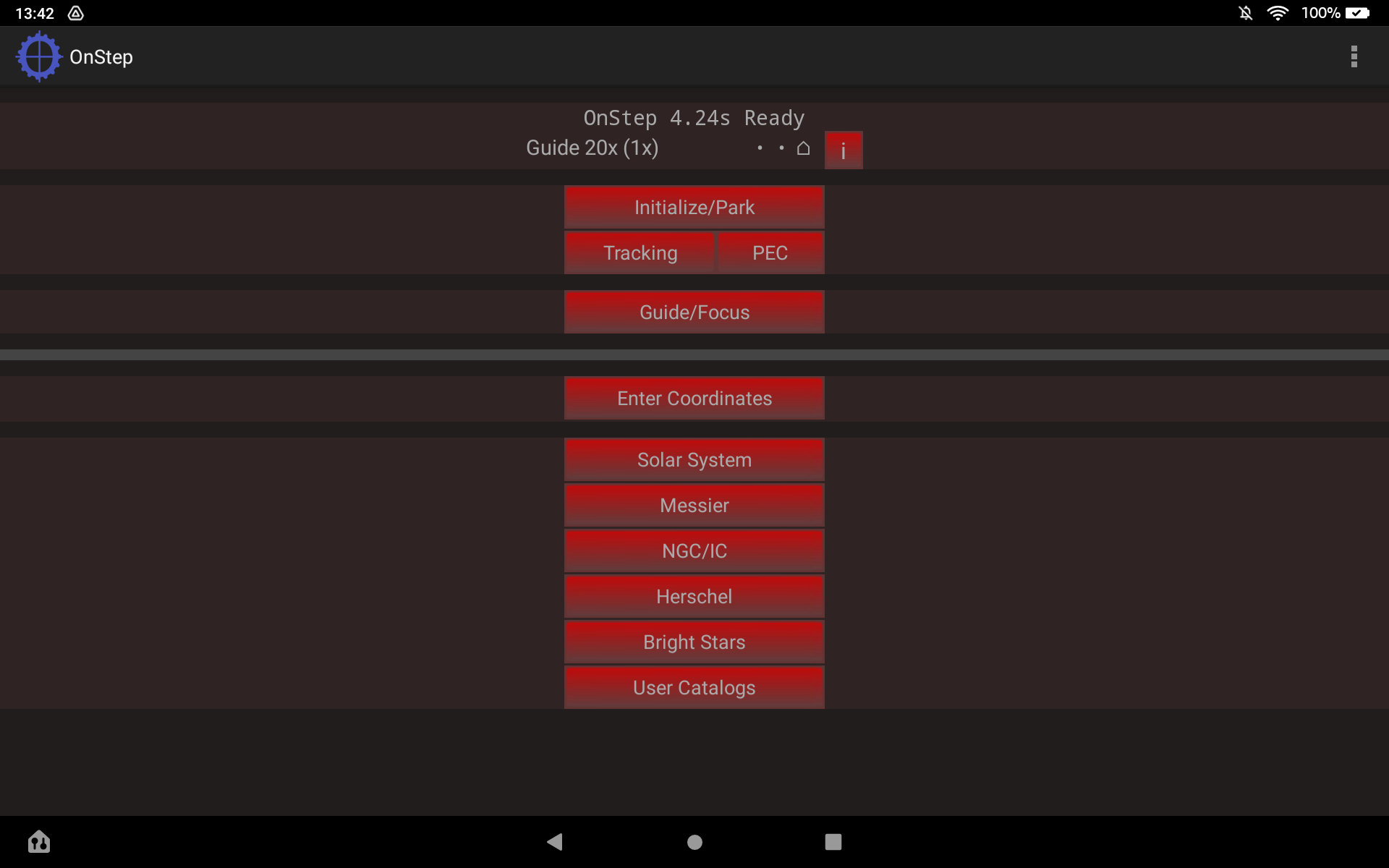
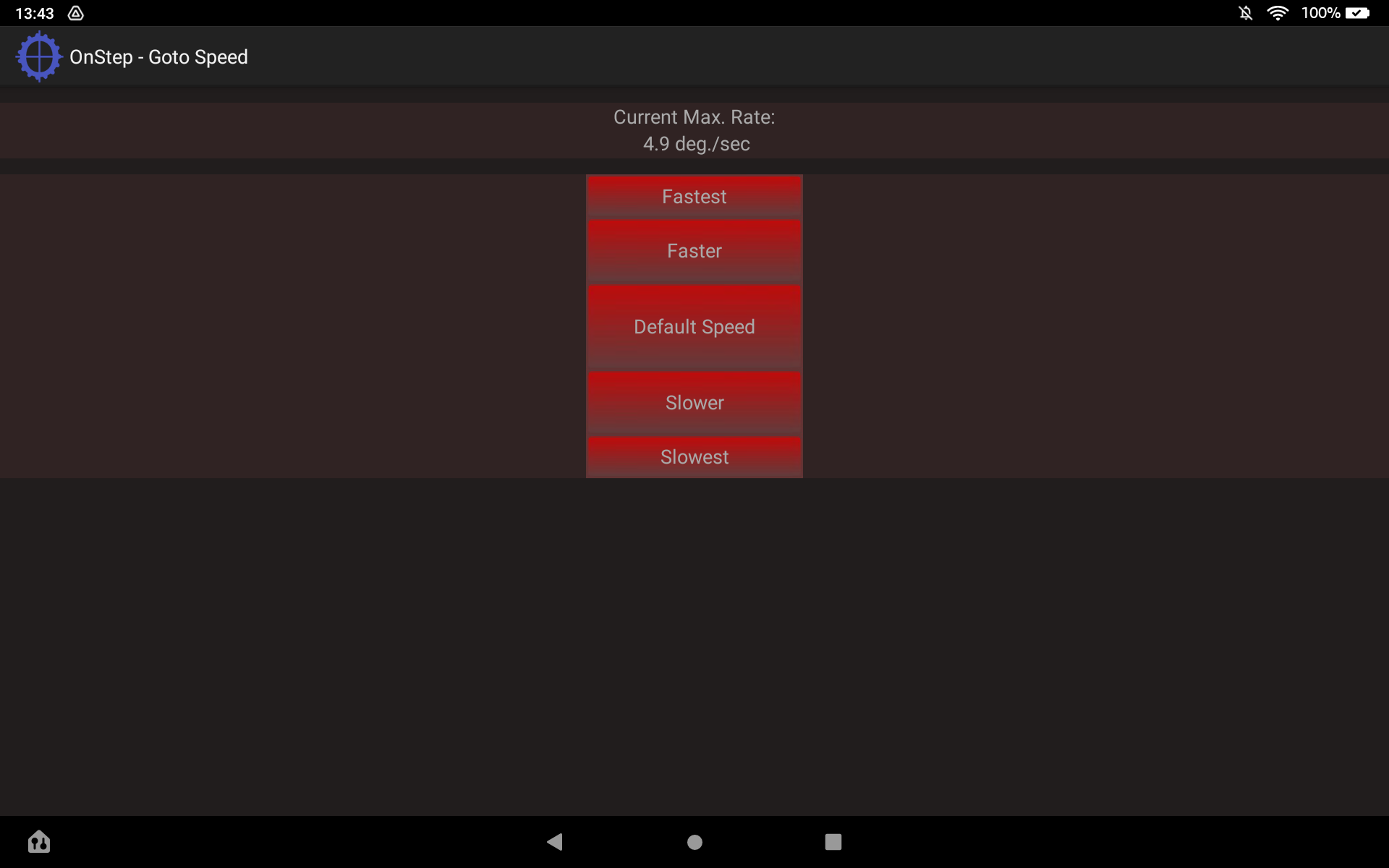
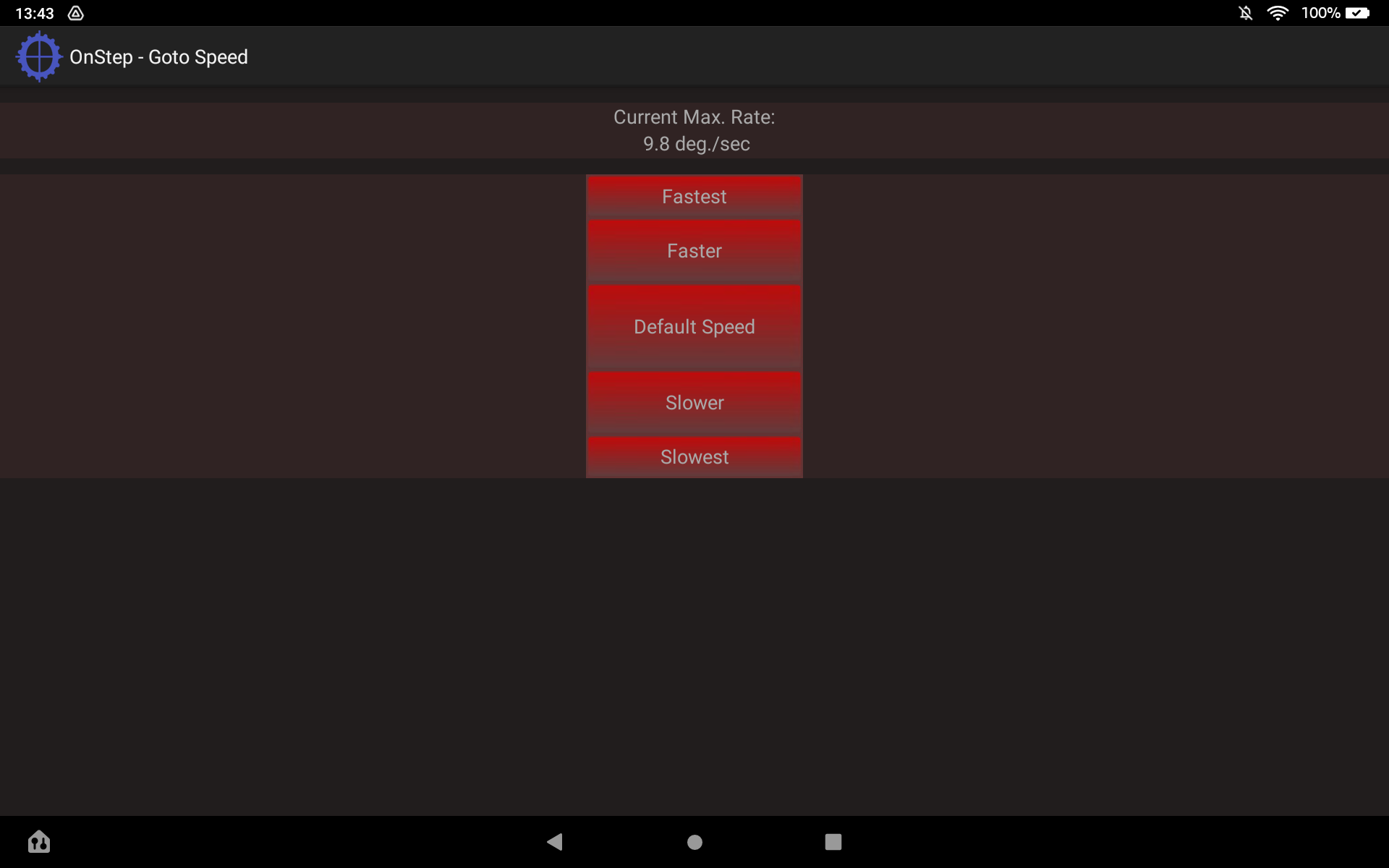
確認用に速度を上げておきます。
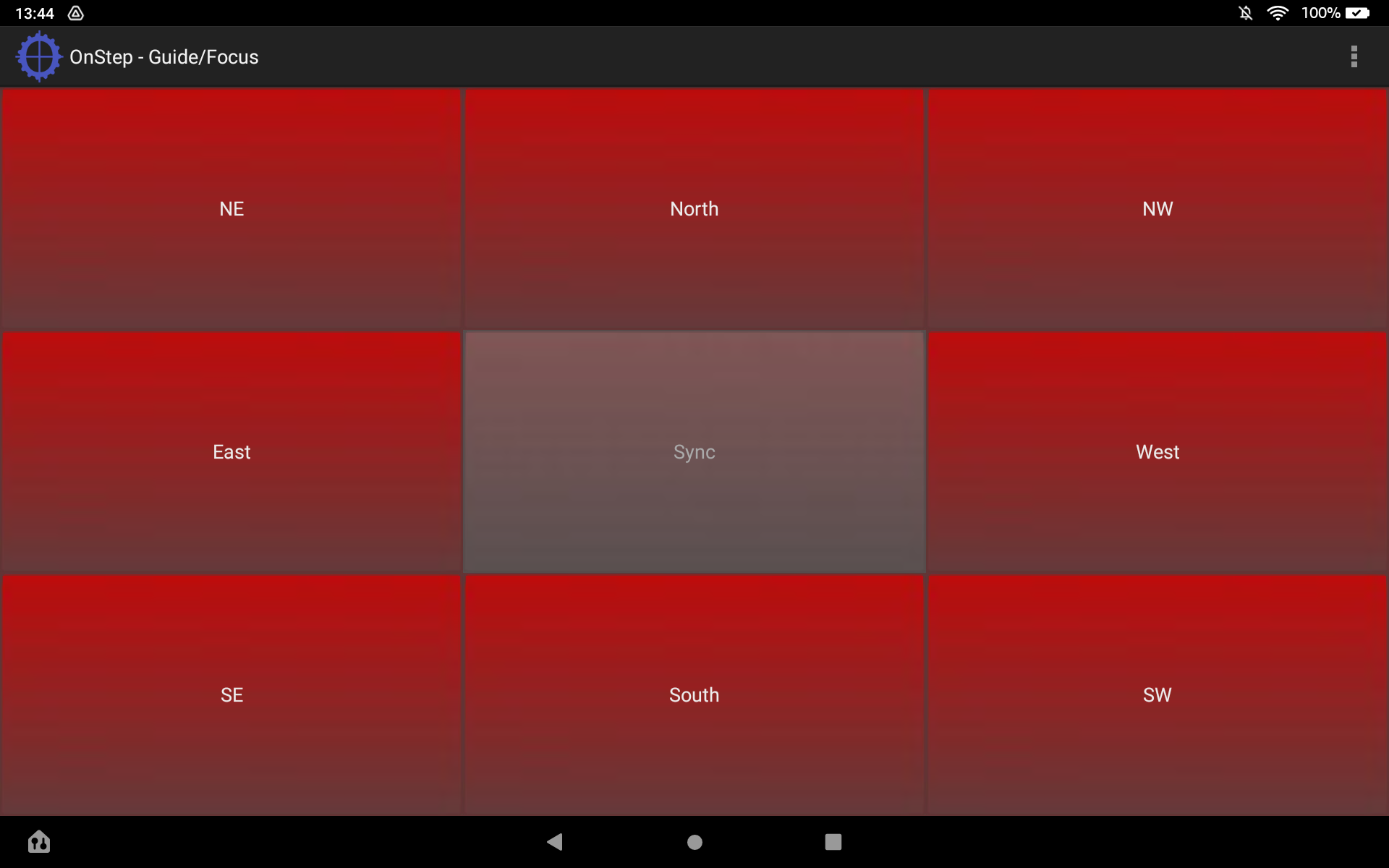
動かないときはLockを解除して、真ん中のSyncを押してから、操作してみてください。。


1分露光はいけているようです。

5分露光はダメですね。

月の条件が良いときに通常撮影をしようと思います。