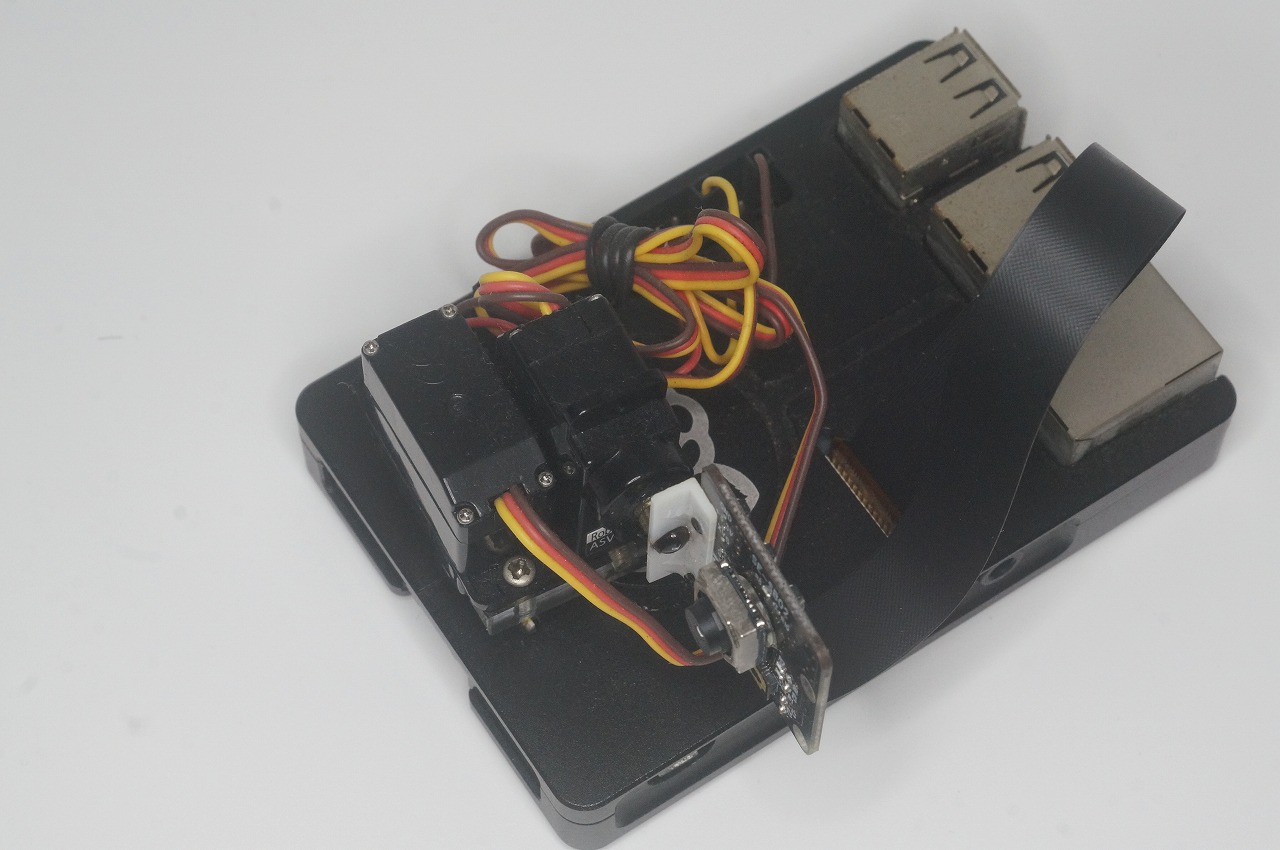
RaspberryPi3BにPWM制御のサーボモータを2個取り付けて、カメラの向きを変えられるようにします。
pi@raspberrypi:~ $ pinout ,--------------------------------. | oooooooooooooooooooo J8 +==== | 1ooooooooooooooooooo | USB | +==== | Pi Model 3B V1.2 | | +----+ +==== | |D| |SoC | | USB | |S| | | +==== | |I| +----+ | | |C| +====== | |S| | Net | pwr |HDMI| |I||A| +====== `-| |--------| |----|V|-------' Revision : a02082 SoC : BCM2837 RAM : 1GB Storage : MicroSD USB ports : 4 (of which 0 USB3) Ethernet ports : 1 (100Mbps max. speed) Wi-fi : True Bluetooth : True Camera ports (CSI) : 1 Display ports (DSI): 1 J8: 3V3 (1) (2) 5V GPIO2 (3) (4) 5V GPIO3 (5) (6) GND GPIO4 (7) (8) GPIO14 GND (9) (10) GPIO15 GPIO17 (11) (12) GPIO18 GPIO27 (13) (14) GND GPIO22 (15) (16) GPIO23 3V3 (17) (18) GPIO24 GPIO10 (19) (20) GND GPIO9 (21) (22) GPIO25 GPIO11 (23) (24) GPIO8 GND (25) (26) GPIO7 GPIO0 (27) (28) GPIO1 GPIO5 (29) (30) GND GPIO6 (31) (32) GPIO12 GPIO13 (33) (34) GND GPIO19 (35) (36) GPIO16 GPIO26 (37) (38) GPIO20 GND (39) (40) GPIO21 For further information, please refer to https://pinout.xyz/これではPWMがどれかわかりません。
公式サイトのドキュメントを見てみます。
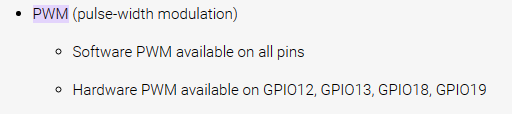
PWM0 が GPIO12 と GPIO18 に、 PWM1 が GPIO13 と GPIO19 に割り当てられています。
WiringPi の時に作ったプログラムに合わせて、GPIO18 と GPIO13 を使うことにします。

// gcc -o goto goto.c -lpigpio -lpthread
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <pigpio.h>
#include <unistd.h>
#define RA 13
#define DEC 18
int main(int ac, char *av[])
{
int ra = 0;
int dec = 0;
int err = 0;
if(ac == 2){
if(strcmp(av[1],"home") == 0){
ra = dec = 0;
}else{
err = 1;
}
}else if(ac == 3){
ra = atoi(av[1]);
dec = atoi(av[2]);
ra = (ra < -90 || ra > 90) ? 0 : ra;
dec = (dec < 0 || dec > 90) ? 0 : dec;
}else{
err = 1;
}
if(err == 1){
printf("usage:%s ra dec\n ra:-90~90 rec:0~90\n",av[0]);
exit(1);
}
int ret = gpioInitialise();
if (ret < 0)
{
return ret;
}
else
{
int pwm_ra = 1500 + 10 * ra;
int pwm_dec = 1500 - 10 * dec;
gpioServo(RA , pwm_ra);
gpioServo(DEC, pwm_dec);
sleep(1);
gpioTerminate();
}
return ret;
}
sudo ./goto home7回実行
demo.sh
#!/bin/sh sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home sudo ./goto 30 60 sudo ./goto home
*/
#include <stdio.h>
#include <stdlib.h>
#include <wiringPi.h>
#include <unistd.h>
#define BASE_CLOCK 192
#define MIN_WIDTH 630 //usec
#define MAX_WIDTH 2500 //usec
#define SG90_ANGLE 180
#define RA 13
#define DEC 18
int main(int ac, char *av[])
{
int pwm_range = 4000;
int pwm_clock = atoi(av[1]);
int pwm_min = (MIN_WIDTH * BASE_CLOCK) / (pwm_clock * 10);
int pwm_max = (MAX_WIDTH * BASE_CLOCK) / (pwm_clock * 10);
int wait = 12 * 3600 /(pwm_max - pwm_min) * 1000000;
// int wait = 12 * 3600 /(pwm_max - pwm_min) * 1000;
int ra = atoi(av[2]);
int pwm_ra = pwm_min + (pwm_max - pwm_min) / SG90_ANGLE * (90 - ra);
int dec = atoi(av[3]);
int pwm_dec = pwm_min + (pwm_max - pwm_min) / SG90_ANGLE * (90 - dec);
if (wiringPiSetupGpio() == -1) {
printf("cannot setup gpio.");
return 1;
}
pinMode(RA, PWM_OUTPUT);
pinMode(DEC, PWM_OUTPUT);
pwmSetMode(PWM_MODE_MS);
pwmSetClock(pwm_clock);
pwmSetRange(pwm_range);
pwmWrite(DEC, pwm_dec);
pwmWrite(RA, pwm_ra);
return 0;
}